An arms race is on in the worlds of computation and architectural fabrication research. Robots with increasingly large, fast, and powerful capabilities are available and can produce outputs with military-grade precision. The assumption is that, through the use of these advanced tools, architects will also advance the production of outputs, but can these tools be developed with traditional forms of human engagement still in mind? Robots are not particularly adaptive. They do not integrate changes with ease — at least, not yet. Humans, on the other hand, exhibit great capacity for adaptation but lack the precision of robots. How could precision and adaptation be combined in architecture, specifically within the context of Japan, where I live and work and where imperfections are embraced as part of an ideal form?



Exploring that question was one of the aims behind the STIK (Smart Tool Integrated Konstruction) Pavilion project.
Through yearly laboratory projects, students in Advanced Design Studies at the University of Tokyo (T_ADS), where I teach architecture, have the opportunity to explore non-traditional uses of otherwise traditional materials and approaches. Those projects provide students with unique, new challenges in terms of fabrication, construction, and computation while encouraging limits to be pushed.
For the STIK project, we focused collectively on the development of a scaled-up version of a 3‑D printer that would utilize chopsticks. The latter material was chosen because, in large quantities, it is capable of behaving like particles, can be aggregated, and can be solidified using adhesives. Additionally, its scale as an aggregate is more conducive to production of a building, unlike the smaller-scale materials used in conventional 3‑D printers. To accommodate our material, we also wanted to make a fabrication tool capable of augmenting human capabilities through enhanced networking, which we called a network tool.

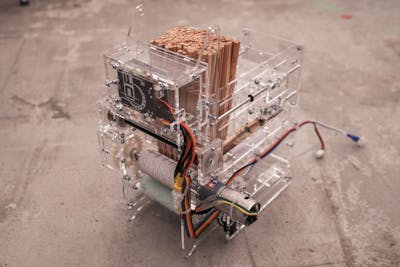
The network tool was developed in two parts: a visual guiding system and a chopstick-dispensing machine. The visual guiding system assists its operators via a projection mapping system and a scanning system using a video projector and a Kinect; a 3D motion sensing and scanning device developed as part of Microsoft’s video game console. The guiding system facilitated operators’ knowledge of where, how, and when to operate the machine, thus achieving an adaptive, real-time, distributed fabrication process. This combination of manual labor and computational analysis required not only the development of hardware but also software and human-machine interfaces. The dispensing machine, developed specifically to deposit a defined amount of chopsticks at a specific location, has characteristics that may be applicable to other scaled-up 3‑D printing processes. The key difference between our approach and more conventional printing processes is that the dispenser is carried by its operator as a mobile, handheld device. Dispenser development aimed to address the following goals:
1) Production/assembly of a form without the use of a physical formwork.
2) Facilitation of construction processes in real-time; output is not a predetermined target, but rather is constantly being adjusted with a feedback system connecting scanning system, structural analysis, and dispensing process.
3) All “printing” devices are networked such that the process can be monitored on both the local and global scales.
Our dispenser facilitated construction processes by acting as a link between the physical form and the digital model. Multiple networked dispensers used at multiple locations across a construction site can contribute to the creation of a single output in a swarm-like process, and the progress can be checked throughout assembly. The system is also capable of scaling, something which is limited in typical 3‑D printers because of their size.





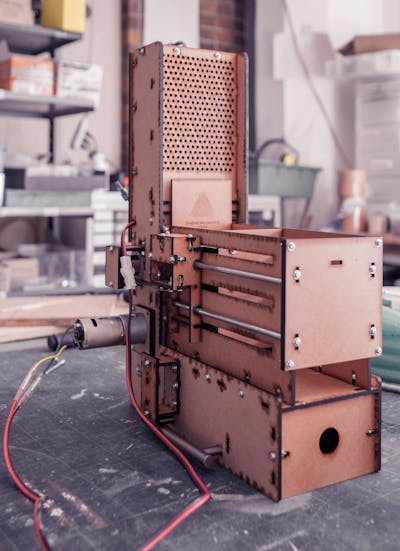
Chopstick Dispenser Machine Development
Our machine evolved as the project requirements and ambitions evolved. The first iteration relied entirely on the use of manpower. A hand-crank turned the mechanisms within the machine and dropped chopsticks. This evolved into a version with a DC motor, which satisfied a requirement for consistent chopstick dropping speed. In initial versions of machine development, glue was not integrated; workers added glue by hand with a brush as outputs were “printed” with chopsticks. As machine development progressed, a modified glue feeder was integrated into the body of the machine, which helped prevent the glue from clogging the dispensing process while also ensuring chopsticks were coated before dropping onto the construction site.
Space was included on the machine for an Arduino board, a low-cost, single-board microcontroller that served to regulate dropping speed and the amount of glue as well as to indicate the relationship of the machine to other machines in the construction process — and, thus, to production overall. Full integration of the Arduino system could allow independent work at multiple sites on a project with multiple teams of workers. Through its capacity for adaptation and the integration of new information, the system can produce outputs using digital formwork, smart technologies, and networked communications.
The STIK Pavilion was not a purely academic project; it was a collaborative effort with Shimizu Corporation, a Japanese construction company. Two of their primary concerns were:
1. Providing a method of assisting less-skilled laborers as numbers of skilled workers decline, and
2. Cost-effective on-site management.
Their approach to construction includes off-site fabrication, which allows all individual parts to be fabricated through industrial processes, brought to the site, and assembled through human involvement and efficient assembly approaches.
The item missing in their approach was the integration of a networked tool for construction crews, which we provided. Over time, tools have developed from simple hand tools to power tools.
Networked tools are the logical next development in that progression.

Figure 1. Progression of Tools
Networked tools allow operators to augment their understanding of construction processes in real time.
The STIK Pavilion project became an opportunity to test that capacity. The dispenser we developed assists and augments human involvement at the construction site and during the construction process. Overall, the ambition of the project extends beyond making a pavilion with chopsticks to exploring the trend of 3‑D printing technology and examining how similar printing processes can produce architecture at full-scale at the construction site. In this system, humans become agents who can be augmented and networked through the use of smart tool devices. Human arms and robotic arms can work together to achieve results that would be impossible without collaboration.
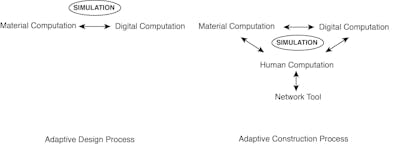
Figure 2. Evolution of Adaptive Design Strategies
In past work at the Architectural Association Design Research Lab in London, I focused on the simulated relationship between material computation and digital computation to create adaptive design proposals (Figure 2, Adaptive Design Process). Simulations would examine a material behavior and then simulate that behavior in the digital environment before attempting to produce that behavior with analog models. Subjectivity and randomization (produced by humans) was minimized as much as possible.
In the present approach (Figure 2, Adaptive Construction Process), however, the human aspect is not only included in the fabrication process; it is also embraced. Inconsistencies introduced to the project by humans are navigated with networked tools, which facilitate ongoing material and digital computations. Such tools allow for production of unique outputs that integrate human randomness, specified forms, and digital computation. The forms produced through this system are not completely pre-defined through computational simulation. Although the forms can be simulated to a degree in a computational environment, they cannot be reproduced accurately due to limitations relating to human and material behavior. The networked tool facilitates a solution for this issue, and ultimately achieves what American economist Leo Cherne hinted at over a quarter-century ago, “The computer is incredibly fast, accurate, and stupid. Man is unbelievably slow, inaccurate, and brilliant. The marriage of the two is a force beyond calculation.”1



Review
By Kengo Kuma
At the University of Tokyo, design and engineering have traditionally had a productive symbiotic relationship, and there has been an established practice of the two fields pushing each other forward. There are few other examples of such partnership within Japan, and even internationally it is rare.
For example, Professor Kenzo Tange, who taught design at the University of Tokyo, and Professor Yoshikatsu Tsuboi, who taught structural engineering, produced a number of excellent architectures through their collaborations. The Yoyogi Olympic Stadium, created for the 1964 Tokyo Olympics, is a seminal example of one of their collaborative projects. It was not merely a fusion of engineering and design (through the application of a suspension structure); the project became possible through the integration of the art of traditional carpentry skills (which were required to fabricate geometrically complex concrete formwork) and the implementation of advanced engineering techniques of that time.
With recent developments in computational processes used as a shared communication tool, at our newly established T_ADS at the University of Tokyo, we once again integrate techniques, design, and tradition in architecture and engineering. We invited the AA School’s Design Research Lab Co-Director, Yusuke Obuchi, to join us in 2010 and started T_ADS in 2014. Our ambition is not only to recreate the fusions accomplished by Tange and Tsuboi, but also to expand architectural research territories by engaging with everyday activities. In the STIK pavilion project, where a pavilion was made of one million chopsticks (a wooden material readily available throughout Japan), the entire production process — from the design of the fabrication machines used to create the pavilion to the design and construction of the final structure — was conducted at T_ADS.
In the industrialized production system established during the twentieth century around the world, including Japan, architectural manufacturing processes and the machinery required for them were only available to a handful of large companies. I believe that the duty of academic institutions today is to investigate means by which this closed system could be opened. It’s our mission at the University of Tokyo to explore research topics that are unthinkable for established large companies and institutions.
For more than 100 years, the University of Tokyo led Japan in industrialization, developed advanced techniques for the production of architecture, and contributed to construction businesses to construct high-quality buildings in Japan. T_ADS aims to continue its experiments with non-conventional projects and materials — such as the chopstick and its relationship to a specially-developed dispensing machine. Through these explorations we hope to link the production of architecture more closely with society and provide a means of speculating on the potentials of architecture today. It is through this pursuit that T_ADS also seeks to reshape both the University of Tokyo and the cultures of architecture in Japan and beyond.
Notes
Gary D. Brooks, “Computer Science: A Neglected Area in Schools of Education,” The Phi Delta Kappan 53: 2 (Oct. 1971): 121 – 122: 122. “As LeoCherne has said, “The computer is incredibly fast, accurate, and stupid. Man is unbelievably slow, inaccurate, and brilliant. The marriage of the two is a force beyond calculation.”2 [note 2: “Remarks by Leo Cherne at the Discover America Meeting, Brussels, June 27, 1968.”]
Biographies
Yusuke Obuchi’s work explores concepts of materiality, design systems, computational design techniques, and fabrication processes in contemporary architecture and design. He is an associate professor of architecture at the University of Tokyo, where he has directed Obuchi Laboratory at the Department of Architecture since 2010. Obuchi is also a founding co-director of the Advanced Design Studies Program at the University of Tokyo, which brings together a design think tank, a computational unit, and labs for digital fabrication, sustainable prototyping, media initiative, social design, and design practice. Obuchi was co-director of the Design Research Laboratory at the Architectural Association (London) from 2005 to 2010 and course master and unit master there from 2003 to 2005. He worked previously for Reiser-Umemoto in New York and ROTO Architects in Los Angeles. His research projects have been exhibited and published widely in the U.S. and Europe, including at venues such as the National Triennial Exhibition at the Cooper Hewitt Museum, the Architecture Biennial Beijing, the Architecture Biennial Rotterdam, the Zurich Design Museum, Tokyo Designers Week, and the Barcelona Design Museum. Email: yobuchi@gmail.com
Kengo Kuma is an architect, writer, and educator. He received a master’s degree in architecture from the University of Tokyo and a Ph.D. from Keio University. He established Spatial Design Studio in 1987, Kengo Kuma & Associates in 1990, and the Europe branch of the latter in Paris in 2008. Since 2009, Kuma has been a professor in the Graduate School of Architecture at the University of Tokyo, where he explores the relationship between practice and education. He taught previously at Columbia University, Keio University, and the University of Illinois at Urbana-Champaign. Kuma’s many awards include the AIA DuPONT Benedictus Award, the Togo Murano Award, the Spirit of Nature Wood Architecture Award (Finland), and the Mainichi Art Award. In 2009, he was decorated as an officier de l’Ordre des Arts et des Lettres by the French Minister of Culture. Kuma is an Architecte DESA, Architecte inscrit au Tableau de l’Ordre des Architectes, International Fellow of the Royal Institute of British Architects (RIBA), and Honorary Fellow of the American Institute of Architects (AIA).